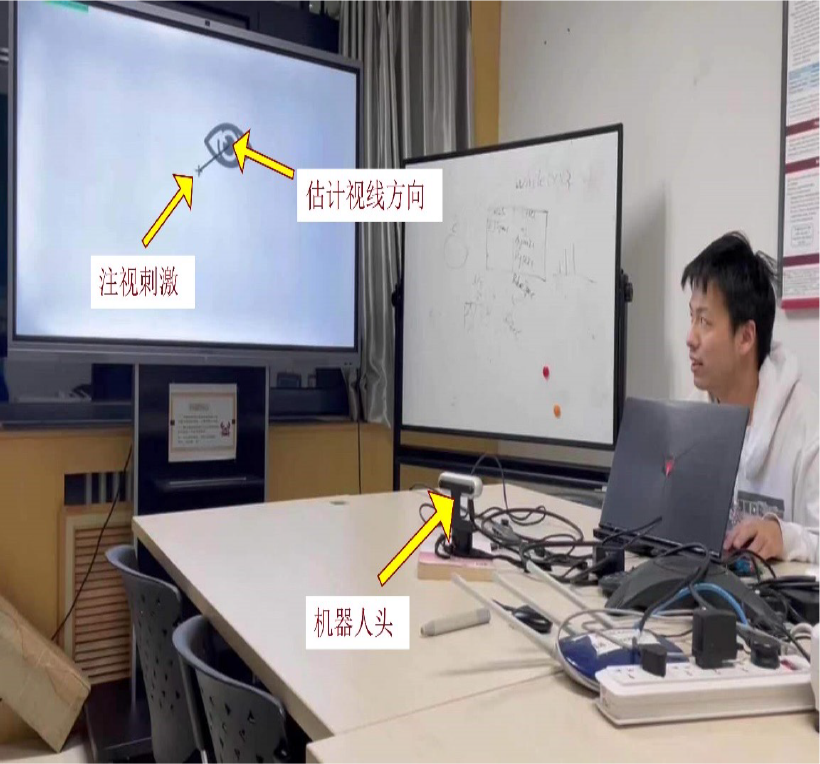
机器人在自由场景中识别人类注意(视线)目标,使用机器人眼(摄像头)实现三维空间中的视线跟踪与注视物体判断。检测模型采用SwinTransformer的基本架构,将ACIR实验室前期研究中的头部姿态检测ICAA 2019,最佳论文)与面部空间权重、眼部个体化信息相结合,幅提高了视线识别的精确度(SMC2023)。从视线序列中提取并分析凝视、扫视等与注意状态相关的时序眼动特征,判断用户认知及注意分析状态。